robotics.net
Several people have asked why the domain robotics.net? I started building mobile robots in the 8th grade (1991) and love robotics. I was blessed enough to get access to the internet when I worked at NASA Godered Spaceflight Center and fell in love with the Internet as well. I started my first internet company in 1994 and registered the domain robotics.net in 1995, reflecting my start in robotics.
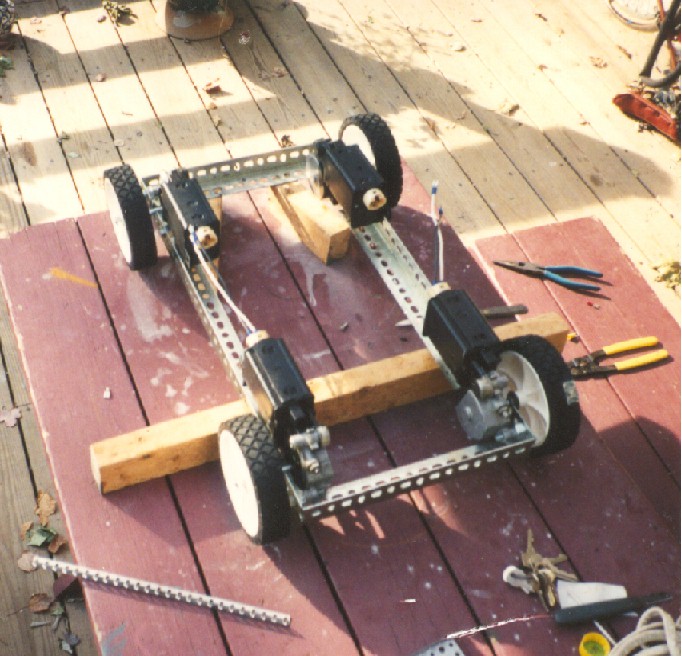
1991: This is the frame of my first robot. I used power window motors I found at a local junk yard for driver motors. The front and rear drive shafts ran through the window motors and were bolted onto lawn mower tires with a few nuts.

This is what my first robot looked like when it was finished. Its task was to deliver mail in an office environment. It has some significant drive/steering problems due to the drive system. The robot ran on a Commodore 64 computer I hacked to run for 12 Volts DC. The software was written in FORTH and let the operator drive the robot around with a joystick (from an Atari 2600) in learn mode. Then the operator would put the robot in play mode, and it would follow through with the routine it learned. The tank drive system made steering very unreliable, and the robot would get off track in under 1 minute.
1992: My second robot was built off the base of the first robot but had a tricycle steering design.
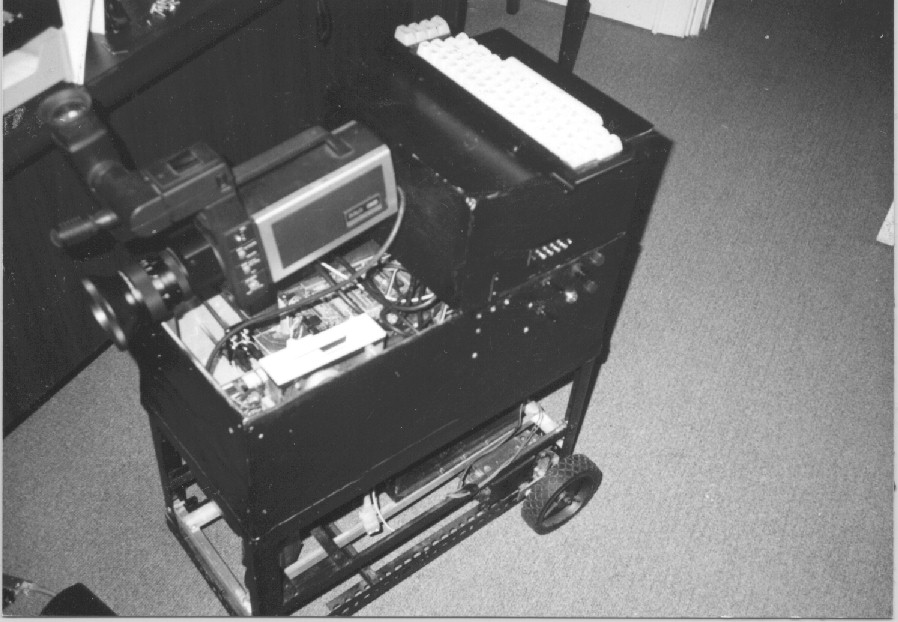
This robot was designed to roam around an office building at night and detect intruders. If it detected anything, it would record it on videotape. This robot had much better steering but still had drive problems because the two motors on the rear drive would get out of sync. This robot also ran on a Commodore 64 running FORTH.
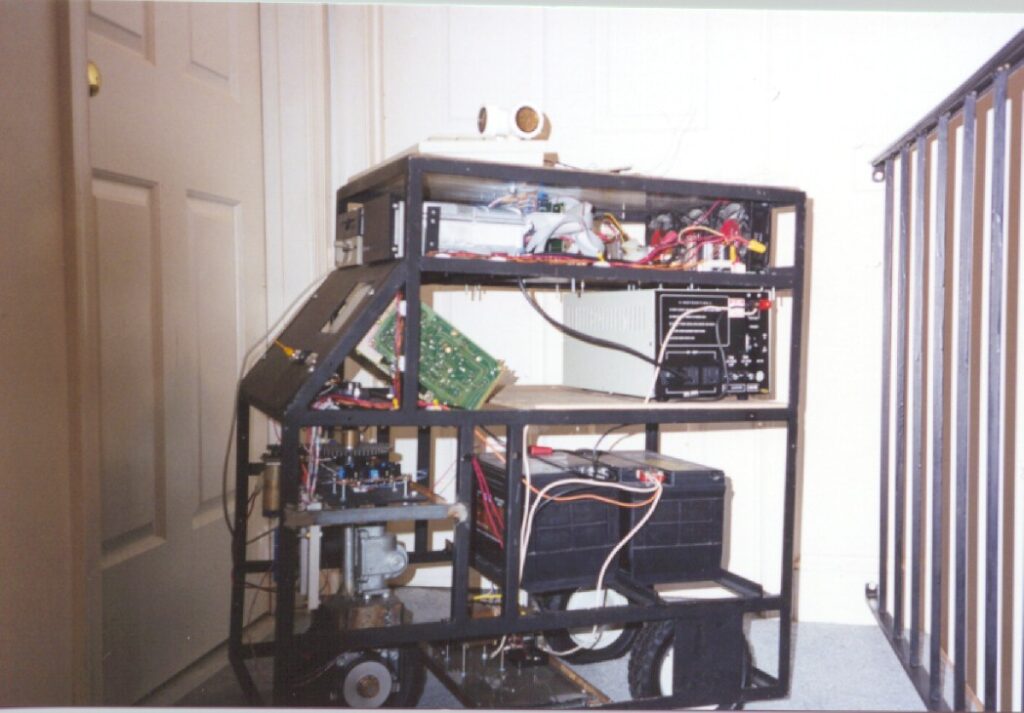
1993: Well, I lost all of the pictures of my 1993 robot. It looked like the bottom of the 1994 robot (I added the top 1/2 in 1994). The robot had a much more accurate drive and steering system, but I had problems controlling the larger motors. The increase in accuracy was partly due to access to an arc welder; I could weld my robot together instead of using pop rivets. I ran out of Commodore 64 boards and wanted more CPU, so I used an i286 to run BASIC in this robot. I decided to build a switching power supply to power the computer, hard drive, and control logic. I thought it would be much more efficient than buying an inverter to switch from DC to AC when the computer power supply would only go back to DC. As it turned out, the supply worked great until something happened with the switching logic I had built one day, and I accidentally sent 24 volts throughout the system. After frying all of my hardware, I put this robot out of its misery and began working on a few other projects.
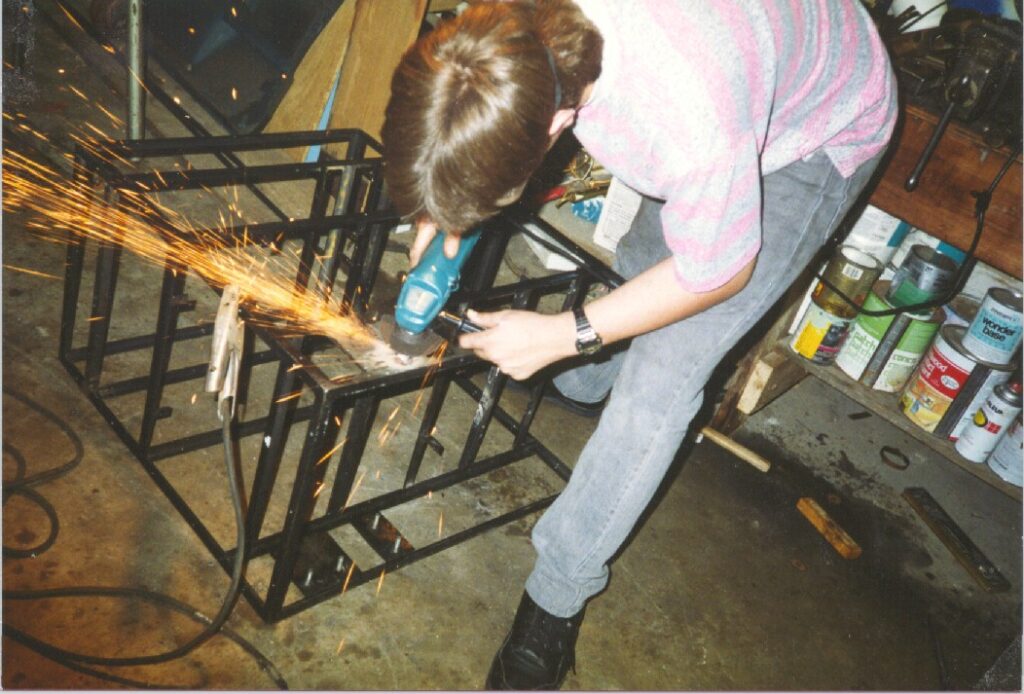
1994: A picture of me riding a new weld on the robot’s frame.
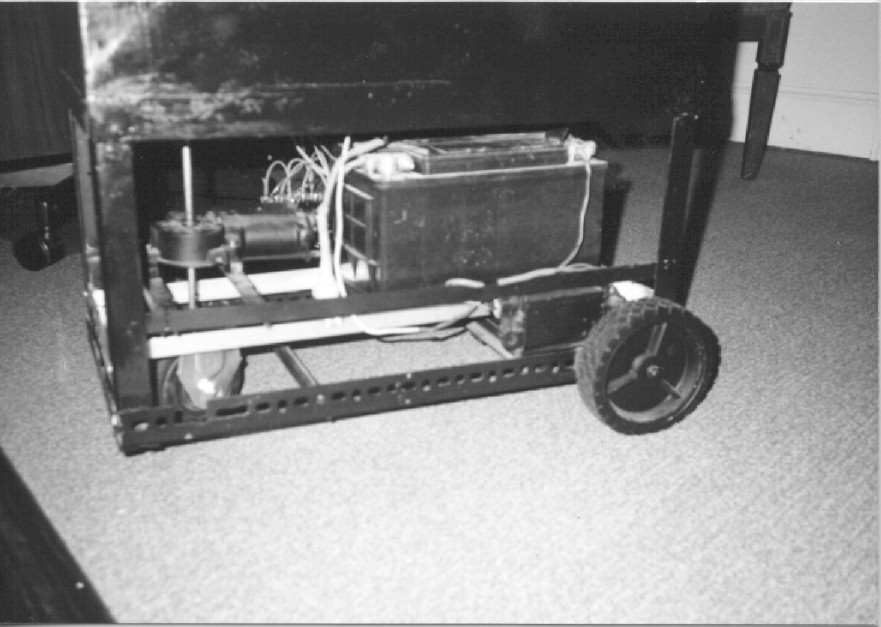
This was what the finished robot looked like; this robot actually turned out rather well. The steering and drive system were quite accurate because of the addition of encoders on the drive and steering shafts. However, the robot would still drift over time. To help correct this problem, I added encoders on the drive and steering shafts to measure motion. I also built a sonar board to allow the robot to measure the distance from objects on three sides. With the sonar system, the robot could correct drifts by checking the distance from walls and other objects. This robot used an i386 for the CPU; I again decided to use FORTH once again.
1995: Instead of building another robot in the 12th grade, I dropped out of high school and started NetRail, Inc., a transit-free national background provider with POPs in 8 US cities.
I well remember those great times. You kept winning awards from NASA, Army, Goddard, U.S. Postal. people would stop at the science fairs and ask your dad and I questions when we were guarding Rombo and his progeny. In just a few seconds they knew that you had done the whole thing yourself. We have always been so proud of you.
Still proudly @robotics.net
So what are you doing now. You can’t have run out of ideas.